
Pixhawk 2.4.8 PIX PX4 32 бит автопилот, система управления полетом 7 м gps 7 м w/4G SD зуммер безопасности переключатель + стр./мин + I2C для RC беспилотный
Описание
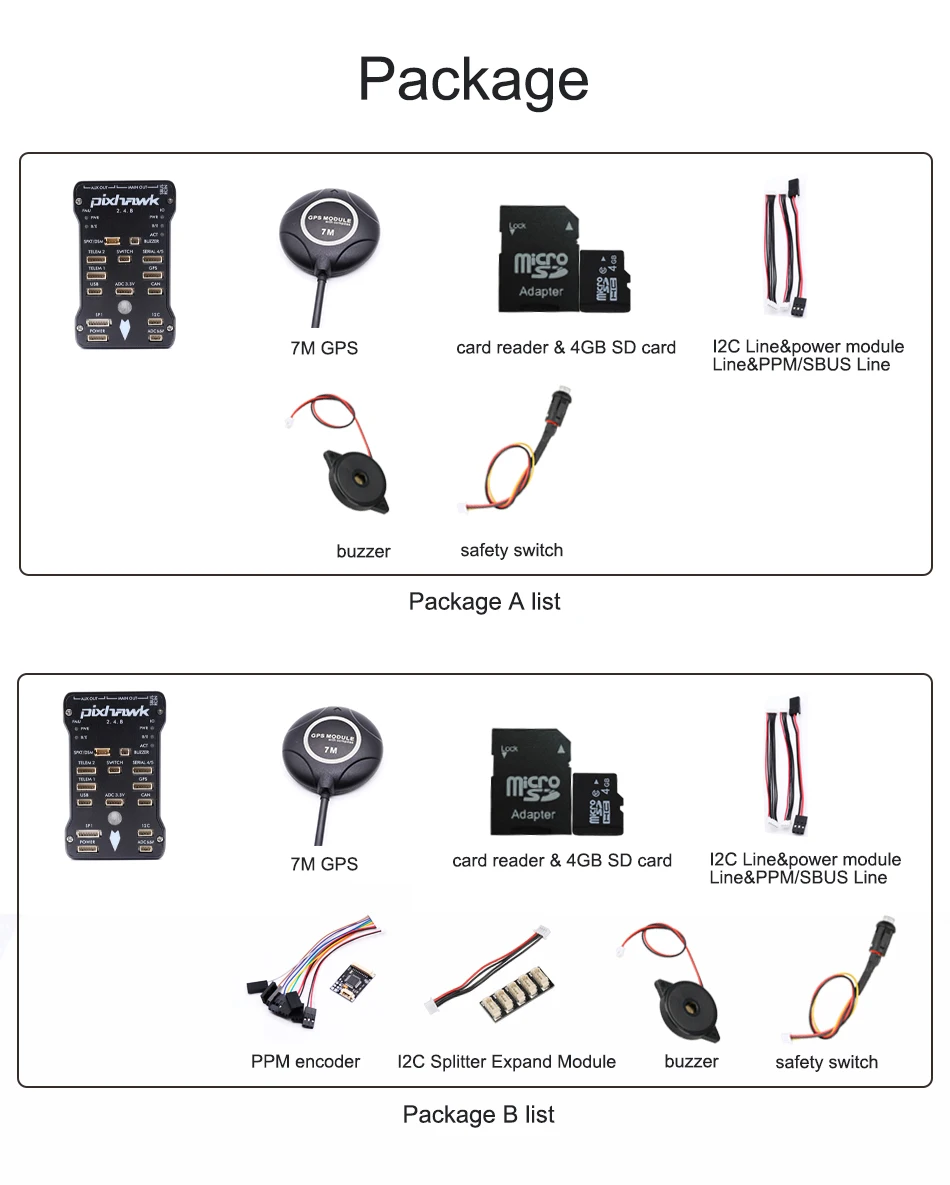
-Расширенный 32 бит CortexM4 ARM Высокопроизводительный процессор, может работать RTOS NuttX в режиме реального времени; Параметры: 1x2.4.8 плата контроллера полета Pixhawk с 4G SD с оболочкой 1 x предохрантитель 1 x зуммер 1 x кард-ридер 1 х 7 м gps модуль с оболочкой 1xI2C линии, 1xpower модуль лазерной линии, 1 xPPM/SBUS линии Посылка B Включает в себя: 1x2.4.8 плата контроллера полета Pixhawk с 4G SD с оболочкой 1 x предохрантитель 1 x зуммер 1 x кард-ридер 1x PPM кодировщик 1x I2CРазветвитель расширения Модуль 1 х 7 м gps модуль с оболочкой 1xI2C линии, 1xpower модуль лазерной линии, 1 xPPM/SBUS линии |




Характеристики
- Бренд
- TEAEGG
- Материал
- Комбинированный материал
- Технические характеристики
- Значение 6
- Колесная база
- Нижняя пластина
- Габаритные размеры
- 51mm*82mm*17mm
- Номер модели
- Pixhawk+7m
- Тип транспорта
- Самолеты
- Расходный материал для инструментов
- Аккумулятор
- Периферийные устройства для дистанционного управления
- Пульт дистанционного управления
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Детали для тюнинга и запчасти
- Амортизатор
- Характеристики
- Сборка
- Детали дистанционного управления и комплектующие
- Регуляторы скорости















































































