
Высокая точность модуль наклона из углоизмерительный электронный прибор с SVT626T Двухосевой цифровой склонность Сенсор
Описание


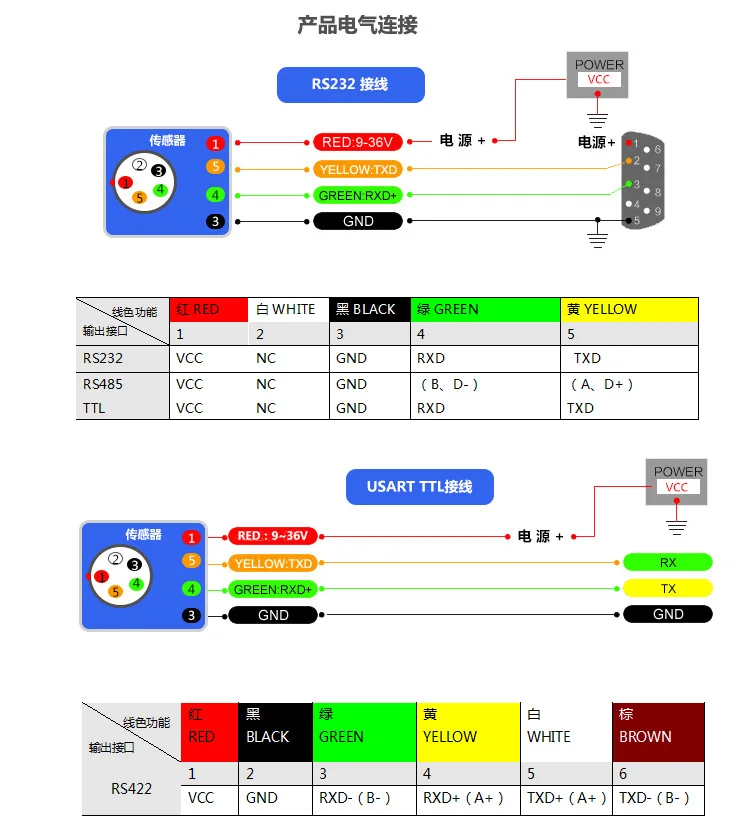
SVT626T-это цифровой выходной двухосный датчик наклона, разработанный технологией McCormack для промышленного управления полями. Он имеет Высокоточный 16 бит a/D конвертер. Через алгоритм фильтрации n-order, он может измерить угол наклона и шаг выходного сигнала датчика относительно горизонтальной поверхности. Выход интерфейс RS232, RS485, RS422, ttl, PWM, подключению CAN-шины не являются обязательными.
Продукт имеет встроенный высокоточный цифровой датчик ADI, который может корректировать температурный дрейф датчика в соответствии с изменением температуры, контролируемым встроенным датчиком температуры, и обеспечить повторяемость продукта в условиях низкой температуры и высокой температуры. Выходная частота 100 Гц. Продукт относится к реальному промышленному продукту с надежной и стабильной производительностью, хорошей расширенностью и источник питания с несколькими выходами. Подходит для различных промышленных систем контроля.
Основные характеристики
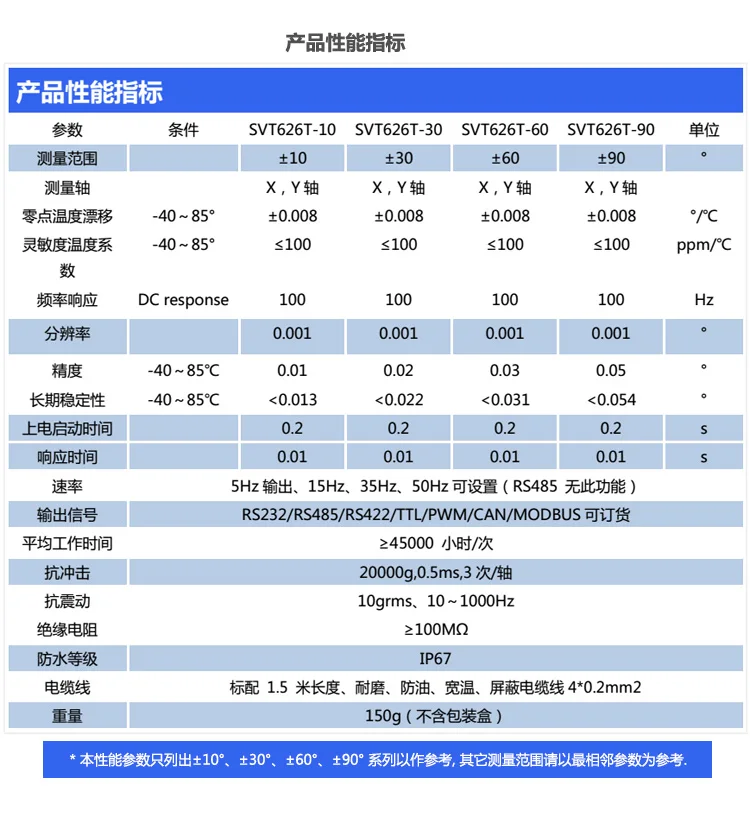
ДвойнойПеремещение по оси наклона мониторингаТочность всего диапазона составляет 0,01-deg, и разрешение составляет 0,001-deg.
Выходная частота 5 ~ 100 Гц опциональноШирокий вход напряжения постоянного тока 9-36 в
Широкотемпературная работа-40 ~ + 85 температура _Диапазон0 ~± 90 & deg; (опционально)
Высокая степень вибрации> 20000 гРегулируемая скорость aud 2400-115200
IP67 с настенным креплением уровень защитыВыход RS232/RS485/ttl (опционально)
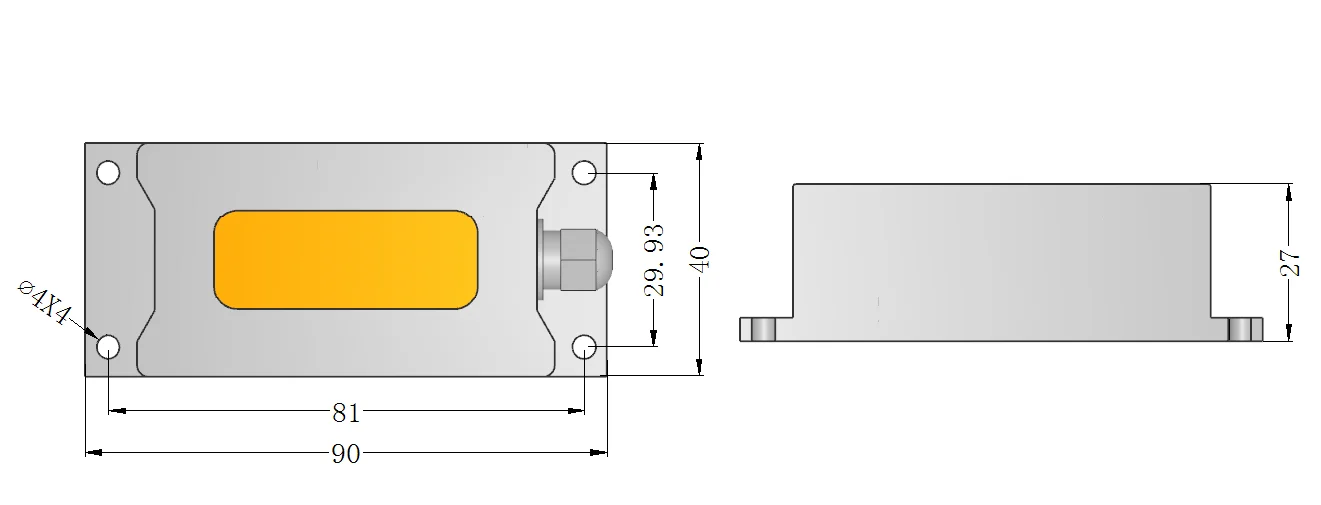
Малый объем (90*40*27 мм) (настраиваемый)

При установке поверхность установки датчика должна храниться параллельно измеренной целевой поверхности; продукт может быть установлен горизонтально или вертикально (Варианты одной и двойной осиДля установки см. следующую схему:
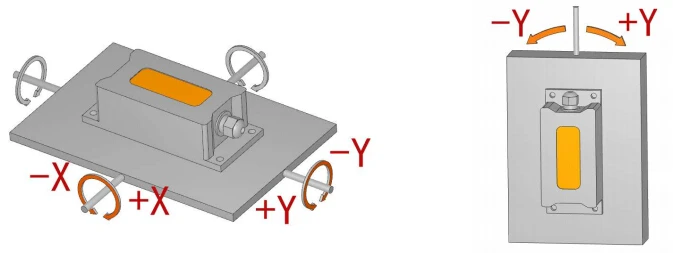

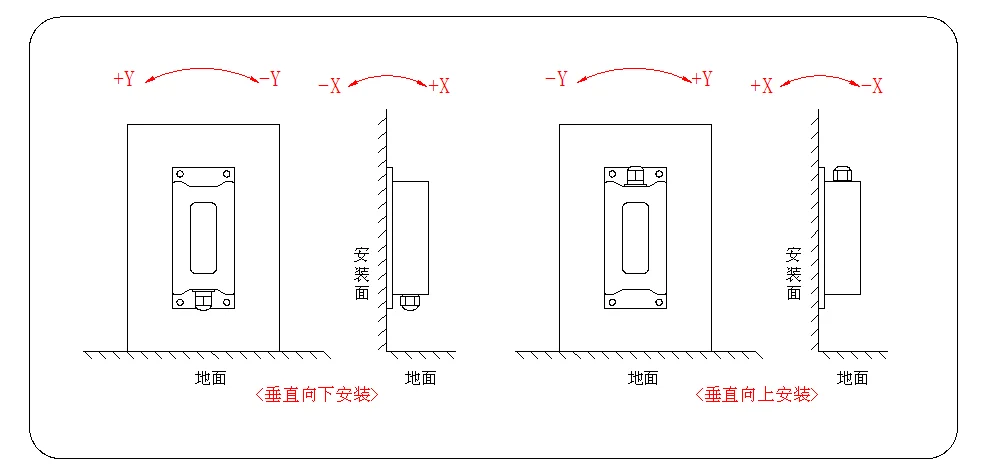
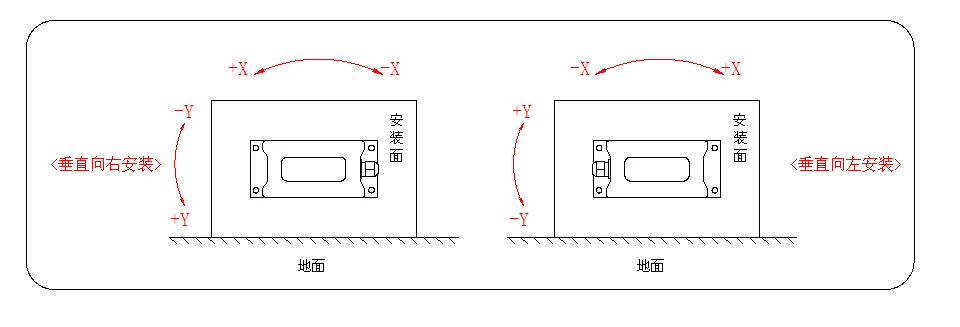
Пожалуйста, установите датчик наклона в соответствии с правильным способом, неправильная установка может привести к погрешности измерения, особенно внимание на 1 & ldquo; поверхность & rdquo; 2 & ldquo; Линия & rdquo;:
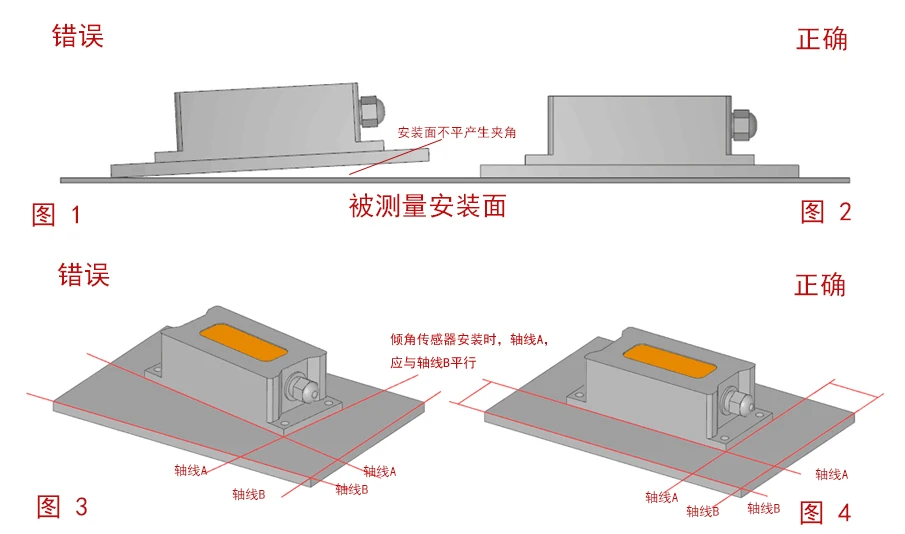
1) Поверхность установки датчика и измеренная поверхность должны быть зафиксированы плотно, плавно и стабильно. Если поверхность установки неровная, это легко привести к погрешности угла измерения датчика. См. цифры 1 и 2
2) ось датчика должна быть параллельной измеренной оси, и угол между двумя осями следует избегать, насколько это возможно. См. цифры 3 и 4


'
Характеристики
- Тип
- Части Кондиционера















































































