
16 В ~ 60 В 500 Вт высокое Мощность двойной двигатель постоянного тока диск Motor Drive Модуль привод Н мост
Описание
Двойной постоянного тока ворсистая моторная пластина (HМост)
1.Применение характеристики
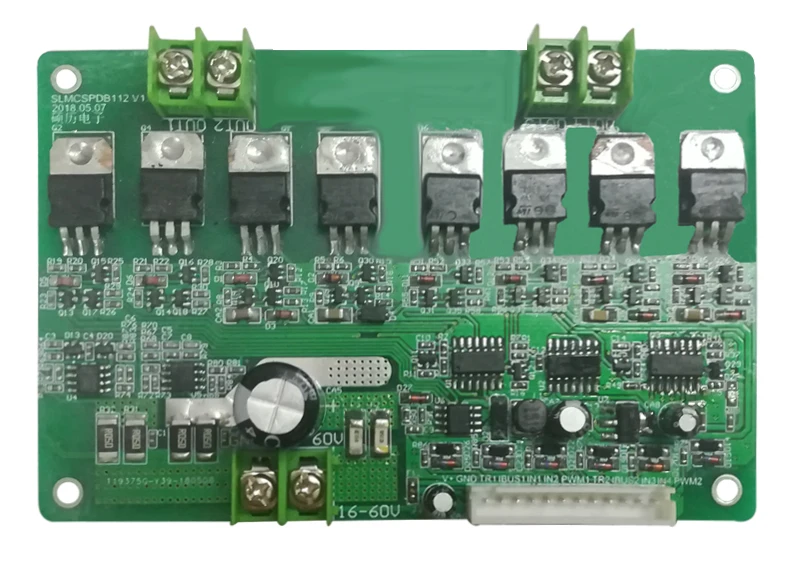
UМалый размер только12 см × 8,0 см.
UШирокий напряжение двигателяДиапазон16-60 В.
UМаксимальный ток нагрузки10A (Простой рассеивания тепла).
UОна имеет избыточный интерфейс защиты.
UДва способ управления двигателем
UПодобныеL298Логику вождения можно управлять тремя проводными регулированием скорости, позитивными инверсии и торможением.
UДоступны3,3 ВИли5 ВУправление SCM и предоставление5 ВМощность питания, ремень200mAВыход защиты.
UИнтерфейсОУРЗащиты.
2.Функциональная введение
2,1Структура схема
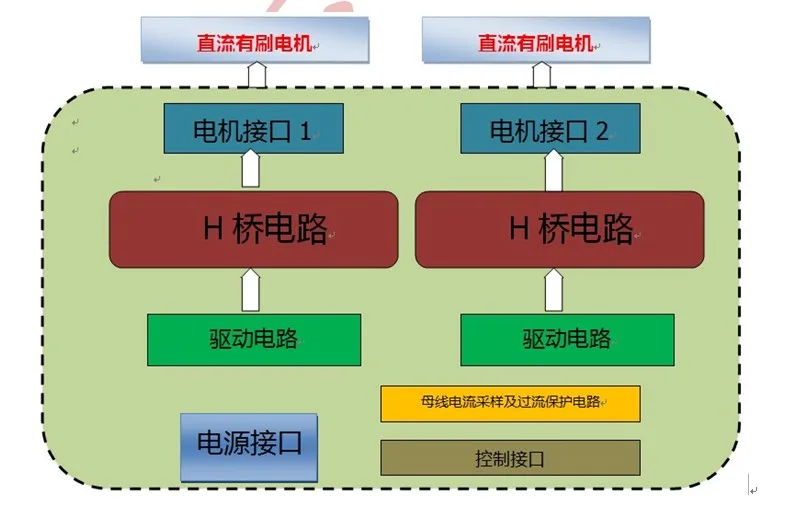
Диаграмма2,0Схема структуры приводной табличной системы
2.Интерфейс определение
2. 2,1Мощность интерфейс
Мощность интерфейсJ4ПоСлева справа находятся отрицательный полюс блока питания и позитивный полюс блока питания.. Пластины внутреннего блока питания позитивная полоса24AПредохранитель. (блок питания не может быть отменен, иначе он сгорает дисковод).

Диаграмма2,1Мощность входной интерфейс
| Серийный номер | Определение | Объяснить | Примечания |
| J4.1 | GND | Мощность отрицательный электрод | |
| J4.2 | 16-60 В | Мощность катод | 16 В ~ 60 ВМощность вход |
Поверхность2,0
2. 2,2Мотор Интерфейс
Электрических машин1ИнтерфейсJ1Мотор2ИнтерфейсJ2. Непосредственно Подключаем две линии щеточного мотора.Неравномерность.Меняю две линии мотора, то есть, мотор меняется.

Диаграмма2,2Мотор Интерфейс
2. 2,3Управление и выборки интерфейс
Управление и выборки интерфейсJ3,Слева направо, соответственно.V +,GND,TR1,IBUS1,IN1,IN2,PWM1,TR2,IBUS2,IN3,IN4,PWM2.(Полностью совместимый)3,3 ВИ5 ВОдин микрокомпьютер чип)

Диаграмма2,3Интерфейс управления
| Серийный номер | Определение | Объяснить | Примечания | |
| J3.1 | V + | 5 ВМощность Положительный выход | 5 ВВыход,J2.1ИJ2.2Сумма выходного нынешнего потенциала200mA | |
| J3.2 | GND | Мощность отрицательный электрод | 0 В | |
| J3.3 | TR1 | 10AЗащита от перегрузки по току триггер | Низкий уровень эффективной | Электрический Машина 1 |
| J3.4 | IBUS1 | Автобус текущий аналоговый | 25 мНапряжение в обоих концах дискретного резистора.11Моделирование после раз | |
| J3.5 | IN1 | Управление двигателем входной интерфейс1 | TtlУровеньIOКонтроль рот | |
| J3.6 | IN2 | Управление двигателем входной интерфейс1 | TtlУровеньIOКонтроль рот | |
| J3.7 | PWM1 | Управление двигателем входШИМИнтерфейс | TtlУровень, Рекомендуемая частота12 кГц-18 кГц | |
| J3.8 | TR2 | 10AЗащита от перегрузки по току триггер | Низкий уровень эффективной | Электрический Машина 2 |
| J3.9 | IBUS2 | Автобус текущий аналоговый | 25 мНапряжение в обоих концах дискретного резистора.11Моделирование после раз | |
| J3.10 | IN3 | Управление двигателем входной интерфейс1 | TtlУровеньIOКонтроль рот | |
| J3.11 | IN4 | Управление двигателем входной интерфейс1 | TtlУровеньIOКонтроль рот | |
| J3.12 | PWM2 | Управление двигателем входШИМИнтерфейс | TtlУровень, Рекомендуемая частота12 кГц-18 кГц | |
Поверхность2,1
Логика управления является следующей:Указывает на низком уровне.1Представляет собой высокий уровень.XПредставляет любого уровня.
| IN1 | IN2 | PWM1 | OUT1 OUT2 | Электрических машин |
| X | Подвеска | Электрических машин1 | ||
| 1 | 1 | X | Тормоз | |
| 1 | 1 | Full speed положительный поворот | ||
| 1 | 1 | Full speed разворота | ||
| 1 | ШИМ | Вперед скорость вращения регулирования | ||
| 1 | ШИМ | Обратный регулирование скорости | ||
| IN3 | IN4 | PWM2 | OUT3 OUT4 | Электрических машин |
| X | Подвеска | Электрических машин2 | ||
| 1 | 1 | X | Тормоз | |
| 1 | 1 | Full speed положительный поворот | ||
| 1 | 1 | Full speed разворота | ||
| 1 | ШИМ | Вперед скорость вращения регулирования | ||
| 1 | ШИМ | Обратный регулирование скорости |
Поверхность2,2
Примечания:ПредложениеШИМСрок службы составляет в пределах 0-96%. Если вы хотите изменить направление вращения мотора, вы должны тормоза сначала.0,2 sВыше и затем передать сигнал обратного, В противном случае обратный электромотив двигателя может привести к внезапным изменениям напряжения питания и повреждению привода; для не-максимальнаяШИМРабочий циклСостояние, если вы хотите изменить направление вращения двигателя, то лучше всего тормозить сначала.0,2 sОбратный сигнал приведен выше, чтобы не вызывать напряжение питания, чтобы сильно колебаться.
2. 3Режим подключения
2. 3,1Двигатель постоянного тока щетки соединения
Одномикросхем микроскопической системы управления проводкой:Используя одномикроскопический микрокомпьютер для управления проводкой двух двигателей, показана следующая схема. Мощность singlechip связана с блоком питания.V + GND;SinglechipШИМВыход разъемPWM1Он используется для контроля скорости.IN1ИIN2Один микрокомпьютерIOДолжен быть подключен. Управление двигателя1Позитивная инверсии и тормоза (настольный логический стол)1,2),2Это то же самое..(Полностью совместим3,3 ВИ5 ВОдин управления микрокомпьютер)
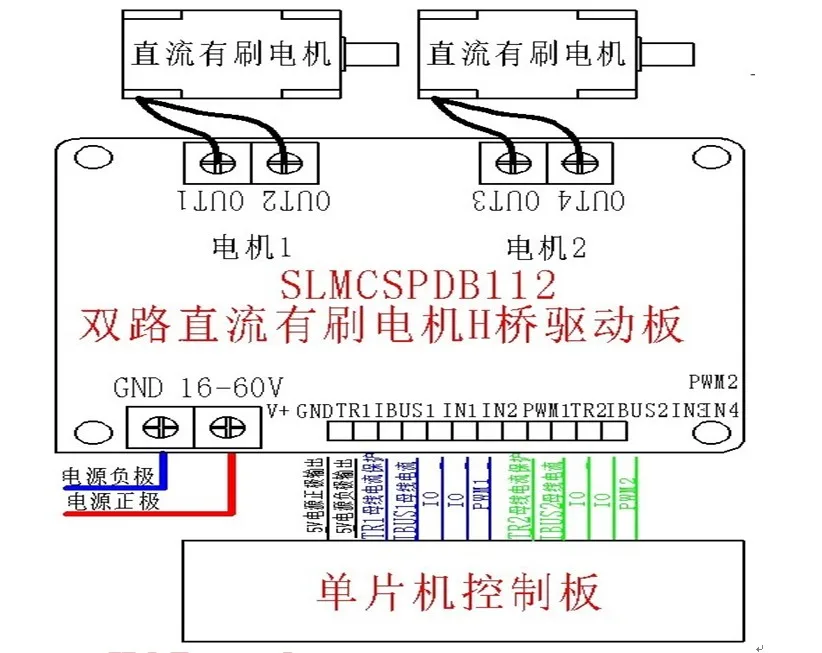
Диаграмма2,4Система управления микрокомпьютерным управлением microcomputer
3.Главный параметр
3,1Технические параметры
| Проект | Параметр | Примечания |
| Мощность входного напряжения | 16 В ~ 60 В | |
| Чистая доска Потребляемая мощность |
Характеристики
- Тип
- Части Кондиционера















































































